One Ring to rule them all, One ring to find them; One ring to bring them all
and in the darkness bind them.
The image search engine we are about to build is going to be so awesome, it could have destroyed The One Ring itself, without the help of the fires of Mt. Doom.
Okay, I’ve obviously been watching a lot of The Hobbit and the Lord of the Rings over this past week.
And I thought to myself, you know what would be awesome?
Building a simple image search engine using screenshots from the movies. And that’s exactly what I did.
Here’s a quick overview:
- What we’re going to do: Build an image search engine, from start to finish, using The Hobbit and Lord of the Rings screenshots.
- What you’ll learn: The 4 steps required to build an image search engine, with code examples included. From these examples, you’ll be able to build image search engines of your own.
- What you need: Python, NumPy, and OpenCV. A little knowledge of basic image concepts, such as pixels and histograms, would help, but is absolutely not required. This blog post is meant to be a How-To, hands on guide to building an image search engine.
Hobbits and Histograms – A How-To Guide to Building Your First Image Search Engine in Python
I’ve never seen a “How-To” guide on building a simple image search engine before. But that’s exactly what this post is. We’re going to use (arguably) one of the most basic image descriptors to quantify and describe these screenshots — the color histogram.
I discussed the color histogram in my previous post, a guide to utilizing color histograms for computer vision and image search engines. If you haven’t read it, no worries, but I would suggest that you go back and read it after checking out this blog post to further understand color histograms.
But before I dive into the details of building an image search engine, let’s check out our dataset of The Hobbit and Lord of the Rings screenshots:
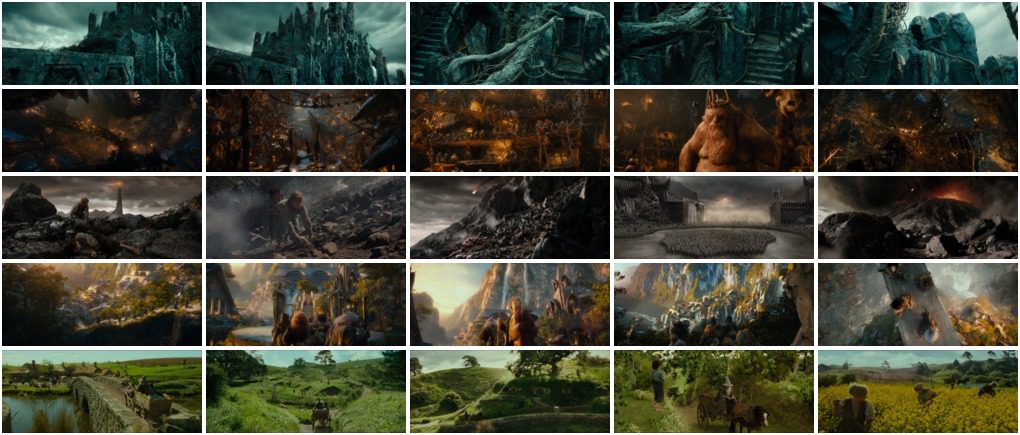
So as you can see, we have a total of 25 different images in our dataset, five per category. Our categories include:
- Dol Guldur: “The dungeons of the Necromancer”, Sauron’s stronghold in Mirkwood.
- Goblin Town: An Orc town in the Misty Mountains, home of The Goblin King.
- Mordor/The Black Gate: Sauron’s fortress, surrounded by mountain ranges and volcanic plains.
- Rivendell: The Elven outpost in Middle-earth.
- The Shire: Homeland of the Hobbits.
The images from Dol Guldur, the Goblin Town, and Rivendell are from The Hobbit: An Unexpected Journey. Our Shire images are from The Lord of the Rings: The Fellowship of the Ring. And finally, our Mordor/Black Gate screenshots from The Lord of the Rings: The Return of the King.
The Goal:
The first thing we are going to do is index the 25 images in our dataset. Indexing is the process of quantifying our dataset by using an image descriptor to extract features from each image and storing the resulting features for later use, such as performing a search.
An image descriptor defines how we are quantifying an image, hence extracting features from an image is called describing an image. The output of an image descriptor is a feature vector, an abstraction of the image itself. Simply put, it is a list of numbers used to represent an image.
Two feature vectors can be compared using a distance metric. A distance metric is used to determine how “similar” two images are by examining the distance between the two feature vectors. In the case of an image search engine, we give our script a query image and ask it to rank the images in our index based on how relevant they are to our query.
Think about it this way. When you go to Google and type “Lord of the Rings” into the search box, you expect Google to return pages to you that are relevant to Tolkien’s books and the movie franchise. Similarly, if we present an image search engine with a query image, we expect it to return images that are relevant to the content of image — hence, we sometimes call image search engines by what they are more commonly known in academic circles as Content Based Image Retrieval (CBIR) systems.
So what’s the overall goal of our Lord of the Rings image search engine?
The goal, given a query image from one of our five different categories, is to return the category’s corresponding images in the top 10 results.
That was a mouthful. Let’s use an example to make it more clear.
If I submitted a query image of The Shire to our system, I would expect it to give me all 5 Shire images in our dataset back in the first 10 results. And again, if I submitted a query image of Rivendell, I would expect our system to give me all 5 Rivendell images in the first 10 results.
Make sense? Good. Let’s talk about the four steps to building our image search engine.
The 4 Steps to Building an Image Search Engine
On the most basic level, there are four steps to building an image search engine:
- Define your descriptor: What type of descriptor are you going to use? Are you describing color? Texture? Shape?
- Index your dataset: Apply your descriptor to each image in your dataset, extracting a set of features.
- Define your similarity metric: How are you going to define how “similar” two images are? You’ll likely be using some sort of distance metric. Common choices include Euclidean, Cityblock (Manhattan), Cosine, and chi-squared to name a few.
- Searching: To perform a search, apply your descriptor to your query image, and then ask your distance metric to rank how similar your images are in your index to your query images. Sort your results via similarity and then examine them.
Step #1: The Descriptor – A 3D RGB Color Histogram
Our image descriptor is a 3D color histogram in the RGB color space with 8 bins per red, green, and blue channel.
The best way to explain a 3D histogram is to use the conjunctive AND. This image descriptor will ask a given image how many pixels have a Red value that falls into bin #1 AND a Green value that falls into bin #2 AND how many Blue pixels falls into bin #1. This process will be repeated for each combination of bins; however, it will be done in a computationally efficient manner.
When computing a 3D histogram with 8 bins, OpenCV will store the feature vector as an (8, 8, 8) array. We’ll simply flatten it and reshape it to (512,). Once it’s flattened, we can easily compare feature vectors together for similarity.
Ready to see some code? Okay, here we go:
# import the necessary packages import imutils import cv2 class RGBHistogram: def __init__(self, bins): # store the number of bins the histogram will use self.bins = bins def describe(self, image): # compute a 3D histogram in the RGB colorspace, # then normalize the histogram so that images # with the same content, but either scaled larger # or smaller will have (roughly) the same histogram hist = cv2.calcHist([image], [0, 1, 2], None, self.bins, [0, 256, 0, 256, 0, 256]) # normalize with OpenCV 2.4 if imutils.is_cv2(): hist = cv2.normalize(hist) # otherwise normalize with OpenCV 3+ else: hist = cv2.normalize(hist,hist) # return out 3D histogram as a flattened array return hist.flatten()
As you can see, I have defined a RGBHistogram class. I tend to like to define my image descriptors as classes rather than functions. The reason for this is because you rarely ever extract features from a single image alone. You instead extract features from an entire dataset of images. Furthermore, you expect that the features extracted from all images utilize the same parameters — in this case, the number of bins for the histogram. It wouldn’t make much sense to extract a histogram using 32 bins from one image and then 128 bins for another image if you intend on comparing them for similarity.
Let’s take the code apart and understand what’s going on:
- Lines 6-8: Here I am defining the constructor for the
RGBHistogram. The only parameter we need is the number of bins for each channel in the histogram. Again, this is why I prefer using classes instead of functions for image descriptors — by putting the relevant parameters in the constructor, you ensure that the same parameters are utilized for each image. - Line 10: You guessed it. The describe method is used to “describe” the image and return a feature vector.
- Lines 15 and 16: Here we extract the actual 3D RGB Histogram (or actually, BGR since OpenCV stores the image as a NumPy array, but with the channels in reverse order). We assume
self.binsis a list of three integers, designating the number of bins for each channel. - Lines 19-24: It’s important that we normalize the histogram in terms of pixel counts. If we used the raw (integer) pixel counts of an image, then shrunk it by 50% and described it again, we would have two different feature vectors for identical images. In most cases, you want to avoid this scenario. We obtain scale invariance by converting the raw integer pixel counts into real-valued percentages. For example, instead of saying bin #1 has 120 pixels in it, we would say bin #1 has 20% of all pixels in it. Again, by using the percentages of pixel counts rather than raw, integer pixel counts, we can assure that two identical images, differing only in size, will have (roughly) identical feature vectors.
- Line 27: When computing a 3D histogram, the histogram will be represented as a NumPy array with
(N, N, N)bins. In order to more easily compute the distance between histograms, we simply flatten this histogram to have a shape of(N ** 3,). Example: When we instantiate our RGBHistogram, we will use 8 bins per channel. Without flattening our histogram, the shape would be(8, 8, 8). But by flattening it, the shape becomes(512,).
Now that we have defined our image descriptor, we can move on to the process of indexing our dataset.
Step #2: Indexing our Dataset
Okay, so we’ve decided that our image descriptor is a 3D RGB histogram. The next step is to apply our image descriptor to each image in the dataset.
This simply means that we are going to loop over our 25 image dataset, extract a 3D RGB histogram from each image, store the features in a dictionary, and write the dictionary to file.
Yep, that’s it.
In reality, you can make indexing as simple or complex as you want. Indexing is a task that is easily made parallel. If we had a four core machine, we could divide the work up between the four cores and speedup the indexing process. But since we only have 25 images, that’s pretty silly, especially given how fast it is to compute a histogram.
Let’s dive into index.py :
# import the necessary packages
from pyimagesearch.rgbhistogram import RGBHistogram
from imutils.paths import list_images
import argparse
import pickle
import cv2
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-d", "--dataset", required = True,
help = "Path to the directory that contains the images to be indexed")
ap.add_argument("-i", "--index", required = True,
help = "Path to where the computed index will be stored")
args = vars(ap.parse_args())
# initialize the index dictionary to store our our quantifed
# images, with the 'key' of the dictionary being the image
# filename and the 'value' our computed features
index = {}
Alright, the first thing we are going to do is import the packages we need. I’ve decided to store the RGBHistogram class in a module called pyimagesearch. I mean, it only makes sense, right? We’ll use cPickle to dump our index to disk. And we’ll use glob to get the paths of the images we are going to index.
The --dataset argument is the path to where our images are stored on disk and the --index option is the path to where we will store our index once it has been computed.
Finally, we’ll initialize our index — a builtin Python dictionary type. The key for the dictionary will be the image filename. We’ve made the assumption that all filenames are unique, and in fact, for this dataset, they are. The value for the dictionary will be the computed histogram for the image.
Using a dictionary for this example makes the most sense, especially for explanation purposes. Given a key, the dictionary points to some other object. When we use an image filename as a key and the histogram as the value, we are implying that a given histogram H is used to quantify and represent the image with filename K.
Again, you can make this process as simple or as complicated as you want. More complex image descriptors make use of term frequency-inverse document frequency weighting (tf-idf) and an inverted index, but we are going to stay clear of that for now. Don’t worry though, I’ll have plenty of blog posts discussing how we can leverage more complicated techniques, but for the time being, let’s keep it simple.
# initialize our image descriptor -- a 3D RGB histogram with # 8 bins per channel desc = RGBHistogram([8, 8, 8])
Here we instantiate our RGBHistogram. Again, we will be using 8 bins for each, red, green, and blue, channel, respectively.
# use list_images to grab the image paths and loop over them
for imagePath in list_images(args["dataset"]):
# extract our unique image ID (i.e. the filename)
k = imagePath[imagePath.rfind("/") + 1:]
# load the image, describe it using our RGB histogram
# descriptor, and update the index
image = cv2.imread(imagePath)
features = desc.describe(image)
index[k] = features
Here is where the actual indexing takes place. Let’s break it down:
- Line 26: We use
list_imagesto grab the image paths and start to loop over our dataset. - Line 28: We extract the “key” for our dictionary. All filenames are unique in this sample dataset, so the filename itself will be enough to serve as the key.
- Line 32-34: The image is loaded off disk and we then use our
RGBHistogramto extract a histogram from the image. The histogram is then stored in the index.
# we are now done indexing our image -- now we can write our
# index to disk
f = open(args["index"], "wb")
f.write(pickle.dumps(index))
f.close()
# show how many images we indexed
print("[INFO] done...indexed {} images".format(len(index)))
Now that our index has been computed, we write it to disk so we can use it for searching later on.
To index your image search engine, just enter the following in your terminal (taking note of the command line arguments):
$ python index.py --dataset images --index index.cpickle [INFO] done...indexed 25 images
Step #3: The Search
We now have our index sitting on disk, ready to be searched.
The problem is, we need some code to perform the actual search. How are we going to compare two feature vectors and how are we going to determine how similar they are?
This question is better addressed first inside searcher.py , then I’ll break it down.
# import the necessary packages
import numpy as np
class Searcher:
def __init__(self, index):
# store our index of images
self.index = index
def search(self, queryFeatures):
# initialize our dictionary of results
results = {}
# loop over the index
for (k, features) in self.index.items():
# compute the chi-squared distance between the features
# in our index and our query features -- using the
# chi-squared distance which is normally used in the
# computer vision field to compare histograms
d = self.chi2_distance(features, queryFeatures)
# now that we have the distance between the two feature
# vectors, we can udpate the results dictionary -- the
# key is the current image ID in the index and the
# value is the distance we just computed, representing
# how 'similar' the image in the index is to our query
results[k] = d
# sort our results, so that the smaller distances (i.e. the
# more relevant images are at the front of the list)
results = sorted([(v, k) for (k, v) in results.items()])
# return our results
return results
def chi2_distance(self, histA, histB, eps = 1e-10):
# compute the chi-squared distance
d = 0.5 * np.sum([((a - b) ** 2) / (a + b + eps)
for (a, b) in zip(histA, histB)])
# return the chi-squared distance
return d
First off, most of this code is just comments. Don’t be scared that it’s 41 lines. If you haven’t already guessed, I like well-commented code. Let’s investigate what’s going on:
- Lines 4-7: The first thing I do is define a
Searcherclass and a constructor with a single parameter — theindex. Thisindexis assumed to be the index dictionary that we wrote to file during the indexing step. - Line 11: We define a dictionary to store our
results. The key is the image filename (from the index) and the value is how similar the given image is to the query image. - Lines 14-26: Here is the part where the actual searching takes place. We loop over the image filenames and corresponding features in our index. We then use the chi-squared distance to compare our color histograms. The computed distance is then stored in the
resultsdictionary, indicating how similar the two images are to each other. - Lines 30-33: The results are sorted in terms of relevancy (the smaller the chi-squared distance, the relevant/similar) and returned.
- Lines 35-41: Here we define the chi-squared distance function used to compare the two histograms. In general, the difference between large bins vs. small bins is less important and should be weighted as such. This is exactly what the chi-squared distance does. We provide an
epsilondummy value to avoid those pesky “divide by zero” errors. Images will be considered identical if their feature vectors have a chi-squared distance of zero. The larger the distance gets, the less similar they are.
So there you have it, a Python class that can take an index and perform a search. Now it’s time to put this searcher to work.
Note: For those who are more academically inclined, you might want to check out The Quadratic-Chi Histogram Distance Family from the ECCV ’10 conference if you are interested in histogram distance metrics.
Step #4: Performing a Search
Finally. We are closing in on a functioning image search engine.
But we’re not quite there yet. We need a little extra code inside search.py to handle loading the images off disk and performing the search:
# import the necessary packages
from pyimagesearch.searcher import Searcher
import numpy as np
import argparse
import os
import pickle
import cv2
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-d", "--dataset", required = True,
help = "Path to the directory that contains the images we just indexed")
ap.add_argument("-i", "--index", required = True,
help = "Path to where we stored our index")
args = vars(ap.parse_args())
# load the index and initialize our searcher
index = pickle.loads(open(args["index"], "rb").read())
searcher = Searcher(index)
First things first. Import the packages that we will need. As you can see, I’ve stored our Searcher class in the pyimagesearch module. We then define our arguments in the same manner that we did during the indexing step. Finally, we use cPickle to load our index off disk and initialize our Searcher.
# loop over images in the index -- we will use each one as
# a query image
for (query, queryFeatures) in index.items():
# perform the search using the current query
results = searcher.search(queryFeatures)
# load the query image and display it
path = os.path.join(args["dataset"], query)
queryImage = cv2.imread(path)
cv2.imshow("Query", queryImage)
print("query: {}".format(query))
# initialize the two montages to display our results --
# we have a total of 25 images in the index, but let's only
# display the top 10 results; 5 images per montage, with
# images that are 400x166 pixels
montageA = np.zeros((166 * 5, 400, 3), dtype = "uint8")
montageB = np.zeros((166 * 5, 400, 3), dtype = "uint8")
# loop over the top ten results
for j in range(0, 10):
# grab the result (we are using row-major order) and
# load the result image
(score, imageName) = results[j]
path = os.path.join(args["dataset"], imageName)
result = cv2.imread(path)
print("\t{}. {} : {:.3f}".format(j + 1, imageName, score))
# check to see if the first montage should be used
if j < 5:
montageA[j * 166:(j + 1) * 166, :] = result
# otherwise, the second montage should be used
else:
montageB[(j - 5) * 166:((j - 5) + 1) * 166, :] = result
# show the results
cv2.imshow("Results 1-5", montageA)
cv2.imshow("Results 6-10", montageB)
cv2.waitKey(0)
Most of this code handles displaying the results. The actual “search” is done in a single line (#31). Regardless, let’s examine what’s going on:
- Line 23: We are going to treat each image in our index as a query and see what results we get back. Normally, queries are external and not part of the dataset, but before we get to that, let’s just perform some example searches.
- Line 25: Here is where the actual search takes place. We treat the current image as our query and perform the search.
- Lines 28-31: Load and display our query image.
- Lines 37-55: In order to display the top 10 results, I have decided to use two montage images. The first montage shows results 1-5 and the second montage results 6-10. The name of the image and distance is provided on Line 27.
- Lines 58-60: Finally, we display our search results to the user.
So there you have it. An entire image search engine in Python.
Let’s see how this thing performs:
$ python search.py --dataset images --index index.cpickle
Eventually, after pressing a key with a window active, you’ll be presented with this Mordor query and results:
query: Mordor-002.png 1. Mordor-002.png : 0.000 2. Mordor-004.png : 0.296 3. Mordor-001.png : 0.532 4. Mordor-003.png : 0.564 5. Mordor-005.png : 0.711 6. Goblin-002.png : 0.825 7. Rivendell-002.png : 0.838 8. Rivendell-004.png : 0.980 9. Goblin-001.png : 0.994 10. Rivendell-005.png : 0.996
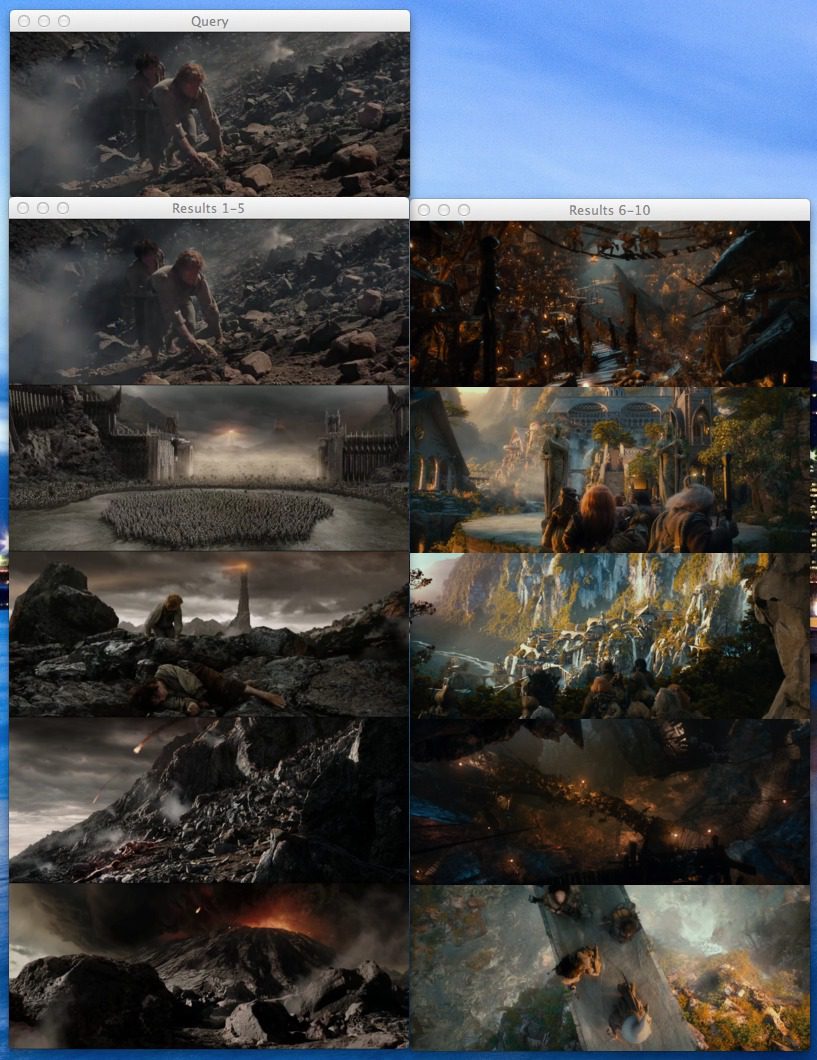
Figure 2: Search Results using Mordor-002.png as a query. Our image search engine is able to return images from Mordor and the Black Gate.Let’s start at the ending of The Return of the King using Frodo and Sam’s ascent into the volcano as our query image. As you can see, our top 5 results are from the “Mordor” category.
Perhaps you are wondering why the query image of Frodo and Sam is also the image in the #1 result position? Well, let’s think back to our chi-squared distance. We said that an image would be considered “identical” if the distance between the two feature vectors is zero. Since we are using images we have already indexed as queries, they are in fact identical and will have a distance of zero. Since a value of zero indicates perfect similarity, the query image appears in the #1 result position.
Now, let’s try another image, this time using The Goblin King in Goblin Town. When you’re ready, just press a key while an OpenCV window is active until you see this Goblin King query:
query: Goblin-004.png 1. Goblin-004.png : 0.000 2. Goblin-003.png : 0.103 3. Golbin-005.png : 0.188 4. Goblin-001.png : 0.335 5. Goblin-002.png : 0.363 6. Mordor-005.png : 0.594 7. Rivendell-001.png : 0.677 8. Mordor-003.png : 0.858 9. Rivendell-002.png : 0.998 10. Mordor-001.png : 0.999
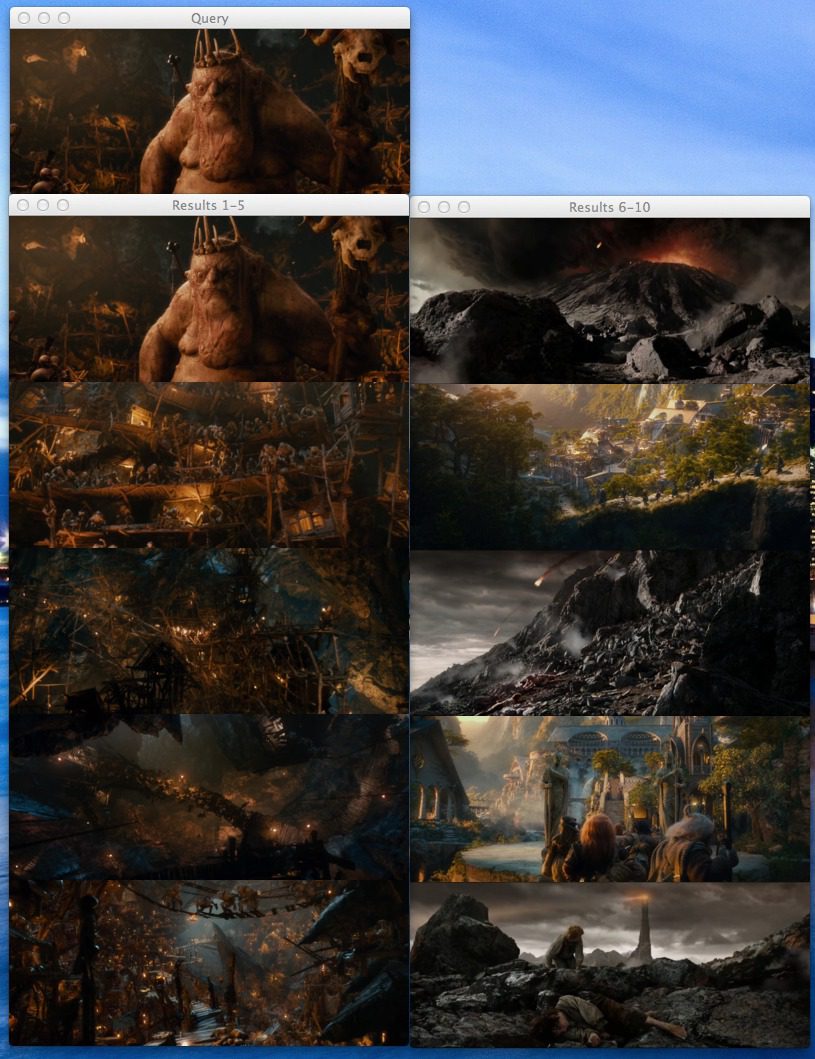
Figure 3: Search Results using Goblin-004.png as a query. The top 5 images returned are from Goblin Town.The Goblin King doesn’t look very happy. But we sure are happy that all five images from Goblin Town are in the top 10 results.
Finally, here are three more example searches for Dol-Guldur, Rivendell, and The Shire. Again, we can clearly see that all five images from their respective categories are in the top 10 results.

Bonus: External Queries
As of right now, I’ve only shown you how to perform a search using images that are already in your index. But clearly, this is not how all image search engines work. Google allows you to upload an image of your own. TinEye allows you to upload an image of your own. Why can’t we? Let’s see how we can perform a search using search_external.py using an image that we haven’t already indexed:
# import the necessary packages
from pyimagesearch.rgbhistogram import RGBHistogram
from pyimagesearch.searcher import Searcher
import numpy as np
import argparse
import os
import pickle
import cv2
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-d", "--dataset", required = True,
help = "Path to the directory that contains the images we just indexed")
ap.add_argument("-i", "--index", required = True,
help = "Path to where we stored our index")
ap.add_argument("-q", "--query", required = True,
help = "Path to query image")
args = vars(ap.parse_args())
# load the query image and show it
queryImage = cv2.imread(args["query"])
cv2.imshow("Query", queryImage)
print("query: {}".format(args["query"]))
# describe the query in the same way that we did in
# index.py -- a 3D RGB histogram with 8 bins per
# channel
desc = RGBHistogram([8, 8, 8])
queryFeatures = desc.describe(queryImage)
# load the index perform the search
index = pickle.loads(open(args["index"], "rb").read())
searcher = Searcher(index)
results = searcher.search(queryFeatures)
# initialize the two montages to display our results --
# we have a total of 25 images in the index, but let's only
# display the top 10 results; 5 images per montage, with
# images that are 400x166 pixels
montageA = np.zeros((166 * 5, 400, 3), dtype = "uint8")
montageB = np.zeros((166 * 5, 400, 3), dtype = "uint8")
# loop over the top ten results
for j in range(0, 10):
# grab the result (we are using row-major order) and
# load the result image
(score, imageName) = results[j]
path = os.path.join(args["dataset"], imageName)
result = cv2.imread(path)
print("\t{}. {} : {:.3f}".format(j + 1, imageName, score))
# check to see if the first montage should be used
if j < 5:
montageA[j * 166:(j + 1) * 166, :] = result
# otherwise, the second montage should be used
else:
montageB[(j - 5) * 166:((j - 5) + 1) * 166, :] = result
# show the results
cv2.imshow("Results 1-5", montageA)
cv2.imshow("Results 6-10", montageB)
cv2.waitKey(0)
- Lines 2-18: This should feel like pretty standard stuff by now. We are importing our packages and setting up our argument parser, although, you should note the new argument
--query. This is the path to our query image. - Lines 21 and 22: We’re going to load your query image and show it to you, just in case you forgot what your query image is.
- Lines 28 and 29: Instantiate our
RGBHistogramwith the exact same number of bins as during our indexing step. I put that in bold and italics just to drive home how important it is to use the same parameters. We then extract features from our query image. - Lines 32-34: Load our index off disk using
cPickleand perform the search. - Lines 40-63: Just as in the code above to perform a search, this code just shows us our results.
Before writing this blog post, I went on Google and downloaded two images not present in our index. One of Rivendell and one of The Shire. These two images will be our queries.
To run this script just provide the correct command line arguments in the terminal:
$ python search_external.py --dataset images --index index.cpickle \ --query queries/rivendell-query.png query: queries/rivendell-query.png 1. Rivendell-002.png : 0.195 2. Rivendell-004.png : 0.449 3. Rivendell-001.png : 0.643 4. Rivendell-005.png : 0.757 5. Rivendell-003.png : 0.769 6. Mordor-001.png : 0.809 7. Mordor-003.png : 0.858 8. Goblin-002.png : 0.875 9. Mordor-005.png : 0.894 10. Mordor-004.png : 0.909 $ python search_external.py --dataset images --index index.cpickle \ --query queries/shire-query.png query: queries/shire-query.png 1. Shire-004.png : 1.077 2. Shire-003.png : 1.114 3. Shire-001.png : 1.278 4. Shire-002.png : 1.376 5. Shire-005.png : 1.779 6. Rivendell-001.png : 1.822 7. Rivendell-004.png : 2.077 8. Rivendell-002.png : 2.146 9. Golbin-005.png : 2.170 10. Goblin-001.png : 2.198
Check out the results for both query images below:
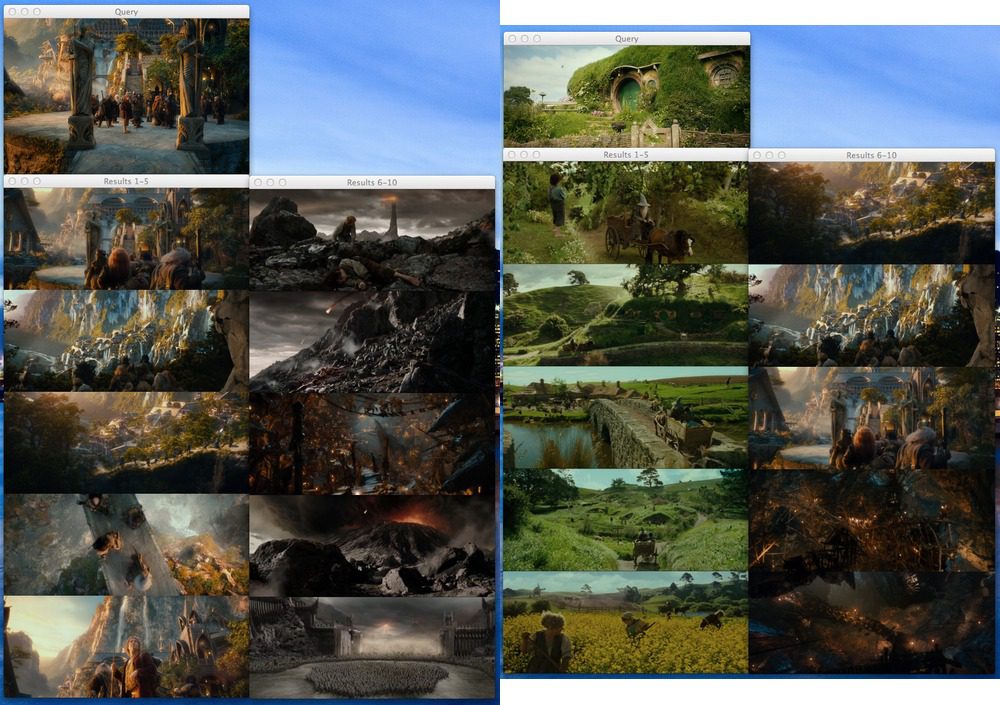
In this case, we searched using two images that we haven’t seen previously. The one on the left is of Rivendell. We can see from our results that the other 5 Rivendell images in our index were returned, demonstrating that our image search engine is working properly.
On the right, we have a query image from The Shire. Again, this image is not present in our index. But when we look at the search results, we can see that the other 5 Shire images were returned from the image search engine, once again demonstrating that our image search engine is returning semantically similar images.
What's next? I recommend PyImageSearch University.

30+ total classes • 39h 44m video • Last updated: 12/2021
★★★★★ 4.84 (128 Ratings) • 3,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 30+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 30+ Certificates of Completion
- ✓ 39h 44m on-demand video
- ✓ Brand new courses released every month, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 500+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In this blog post, we’ve explored how to create an image search engine from start to finish. The first step was to choose an image descriptor — we used a 3D RGB histogram to characterize the color of our images. We then indexed each image in our dataset using our descriptor by extracting feature vectors (i.e. the histograms). From there, we used the chi-squared distance to define “similarity” between two images. Finally, we glued all the pieces together and created a Lord of the Rings image search engine.
So, what’s the next step?
We’re just getting started. Right now we’re just scratching the surface of image search engines. The techniques in this blog post are quite elementary. There is a lot to build on. For example, we focused on describing color using just histograms. But how do we describe texture? Or shape? And what is this mystical SIFT descriptor?
All those questions and more, answered in the coming months.
If you liked this blog post, please consider sharing it with others.

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

How robust is this approach?
Add in random images from the web. Your corpus of images are obviously selected from clusters of different, strong colors. (the rows you organized them in).
I realize it’s only one feature, and it’s an early start, but tiny datasets do more harm than good when making broad claims to the image or search communities.
Hi kerosene, thanks for leaving the reply.
Perhaps you didn’t see my previous post, Clever Girl: A Guide to Utilizing Color Histograms for Computer Vision and Image Search Engines. Specifically, check out the “Drawbacks” section.
Color histograms, by definition, ignore the texture and shape of objects in an image. Semantically, they cannot tell the difference between a red shoe and a red shirt if the color distribution is the only aspect being examined. Thus, more robust methods include local invariant descriptors, such as SIFT, SURF, etc. However, these methods are considerably more complex and very confusing if you are just getting started in computer vision and image search engines.
This blog post simply served as an example of an image search engine. It shows readers that it’s cool and what’s possible with an imagination and an eagerness to explore a new field. I am certainly by no means am making broad claims regarding image or search (and I don’t think this blog post did so either).
Remember the title of this blog post places emphasis on your first search engine. We all learned basic algebra before we learned about systems of linear equations and linear algebra. Similarly, we must examine simple methods such as color histograms and understand why they work (along with their drawbacks) before we explore more complex solutions.
As long as broad claims are not made then starting with a tiny data set is fine. There are many aspects to building an image search capability and these set of blog posts are are doing a wonderful job to get these key areas across to people – technical and non-technical – of what is involved. It might help if each introductory post contained a visible disclaimer of sorts. Otherwise, a terrific set of posts so far.
I’ll definitely keep in mind the disclaimer idea, thanks!
Hello! Just found your article! Are you using python to build Iphone app? and again, how can i connect my images to bring out the information of the thing or person on google? Pls, contact me through my mail
I am not using Python to build the iPhone app, just to demonstrate the algorithm. The code can easily be ported over to iOS though.
Great article Adrian 😉
Thank you! I’m glad you enjoyed it!
Amazing post! Thanks! Even a grumpy old man like me can now figure out how to do image search….! 🙂
Hello Adrian,
Congratulations for this post, it’s amazing how easy you show it.
What about images in black and white? Is it different? What’s the best way to clusterize and do an accurate search on them?
Hi Jose, shoot me an email and we can discuss clustering images.
It more like collaborative filtering I must say, but how scalable is this ? Consider You have 100 thousand images to churn through.
A nicely compiled post none the less.
This current approach isn’t that scalable. In order to make it scale to 100 thousand images you would either have to put this behind a MapReduce cluster or (a better approach) would be to generate clusters of similar color distributions and then only search within the relevant clusters.
I’ll be giving this a try shortly. Any suggestions of how to go about it? What should I try first?
The easiest method is to apply k-means clustering on the color histograms for the images. Then at search time, compute the distance from the color histogram to all centroids. Once you find the closest centroid, you can rank all images that belong to the cluster.
Another approach is to use keypoint detection, local invariant descriptors, and the bag of visual words model to build a scalable image search engine with an inverted index. I cover exactly how to do this inside the PyImageSearch Gurus course.
Great Work, Awesome entertaining way to describe Image algorithms…. Keep it up Adrian… 🙂
hello Adrian,
Thanks for a great Blog ,i previously had no knowledge in computer vision , and i find your contribution here fun and interesting …. thirsty for more !
keep it up adrian , this is very good .
Thanks for the comment! I’m glad you’re enjoying the content — and trust me, I won’t be slowing down any time soon!
>how many Blue pixels fall into bin #1
Looks like a typo to me.
Hi Dmitry, where are you seeing the typo?
Hi Adrian,
I think Dmitry refer to sentence in Histogram section.
“The best way to explain a 3D histogram is to use the conjunctive AND. This image descriptor will ask a given image how many pixels have a Red value that falls into bin #1 AND a Green value that falls into bin #2 AND how many Blue pixels fall into bin #1.”
Thanks for pointing this out!
Hi, Adrian.
The post is great and easy to understand.
One question, I tried to dump the index to my disc like this:
f=open(“D:\\test”,”w”)
f.write(cPickle.dumps(index))
however, it didn’t work with the error message ” IOError: [Errno 13] Permission denied”
I have tried to modify the permission setting of the folder, but still the same error.
could you help to tell me where is the problem?
Is
testa directory? If so, that is likely why you are getting the permission error since you are trying to write an existing directory as a file. Iftestis indeed a directory, I would change your code tof=open("D:\\test\\index.cpickle")and that should take care of the problem.Thanks a lot! That’s the point!!
I’m a beginner, and hope to learn more from you !!!
u are soooooo great!
Fantastic, glade to help! And if you’re just getting started learning computer vision and OpenCV, definitely take a look at Practical Python and OpenCV. It will definitely help jumpstart your education!
Hi adrian,
thank you for a great post
I’ve also tried to dump the index to my disc:
f = open(args.index+”\\index.pickle”, “w”)
f.write(pickle.dumps(lst))
f.close()
i’m writing on python 3, and I get the following: “must be str, not bytes”, regarding to the writing line.
can you help me out here?
Thanks for letting me know Michael, I’ll have to look into this. This blog post is meant to be run with OpenCV 2.4 + Python 2.7, not OpenCV 3 + Python 3 — it was written well before OpenCV 3 was released. In the meantime, change the file mode from “w” to “wb” and that should work.
Thanks for this!
I also encountered the same problem….
Hi,
how can i change the query image to another image. And where exactly is the query image picked from
To change the query image, you’ll need to modify this line of code:
queryImage = cv2.imread(path)and change thepathvariable to be the path to where your image resides on disk. An example could bepath = "/path/to/my/image.jpg.hi,
i’m trying to run the code, and i get the error “invalid load key #”
What command are you using to execute the code?
Great tutorial!
If you’re using python on windows for any reason 😉 you’ll have an issue with
index.pybecause of the direct use of/, you need to do the following change:# the original line below doesn't work in windows, the best fix is to # use a generic solution using os.path pnd@oct2015 #k = imagePath[imagePath.rfind("/") + 1:] j, k = os.path.split(imagePath)The problem is that you don’t end up with just the filename on the index and then
search.pywill fail.Thanks for passing along the update Pedro.
^ and of course… import os 🙂
import os
Hi, I made this program, and it worked with the hobbit pics. But, when I use my own pics, it doesn’t work? Can you help?
For external query images (i.e. images not inside the Hobbits dataset), you’ll need to manually supply the path to your query image.
Because I am getting this error
In [1]: runfile(‘C:/pythonpkg/IndexingImages.py’, wdir=’C:/pythonpkg’)
usage: IndexingImages.py [-h] -d DATASET -i INDEX
IndexingImages.py: error: argument -d/–dataset is required
An exception has occurred, use %tb to see the full traceback
You need to execute this script via command line and provide the appropriate command line arguments. I would suggest downloading the code to this post (using the download form at the bottom of the article). At the top of
index.pyandsearch.pyyou’ll find example commands that you can copy and paste into your terminal.One more thing. Plotting multiple images is much easier if you just use MatPlotLib subplots – no need to know the image size or have all your images the same size 😉
Personally, I did a 2×3 subplot to show the original query and the top five results.
In order to get this to work with OpenCV 3.1.0, I had to change
hist = cv2.normalize(hist)to
hist = cv2.normalize(hist, hist)The rest seems to work fine. 🙂
Thanks!
The same is true for OpenCV 3.0.0 as well. There is another important change associated with the
cv2.findContoursmethod for future reference as well.Your comment helped me!! 😀
nice article .. do you have code for ear recognition ? all i can do is an ear detection i dont know how to save the data of a detected ear and how to query the new image of detected ear .. tnx for this tutorial ..i bought your 1st and second edition of your book in bundles with this email addres: team_microtech@yahoo.com.ph .. tnx once again .. cheers!
I personally have never done ear recognition, but I can try to do a tutorial on it in the future.
i just want to know how to save and retrieve data just like face recognition .. i can detect ears using haarcascades but i dont know how torecognize it ..any help will be appreciated tnx in advance and happy holidays .
Have you tried using template matching or SSIM? These are simple approaches that don’t work well in complex cases, but they will at least get you started.
Hi
Thanks for your amazing guide
however when i run Search_external.py or index.py i get this error
(cv)$ python search_external.py -d images -i index.cpickle -q queries/shire-query.png query: queries/shire-query.png Traceback (most recent call last): File "search_external.py", line 35, in queryFeatures = desc.describe(queryImage) File "/Users/saeidakbari/Downloads/hobbit-lotr-image-search-engine-1/pyimagesearch/rgbhistogram.py", line 21, in describe hist = cv2.normalize(hist) TypeError: Required argument 'dst' (pos 2) not foundAgain Thank you
Please the comment from Johannes Brodwall above. The issue is you are using OpenCV 3, but this post was written for OpenCV 2.4. Changing the offending line to
cv2.normalize(hist, hist)will resolve the problem.Can anyone please suggest how can i cluster these images, once i have retrieved the feature vectors?
Hey Sahil — as I mentioned in an email to you, I cover image clustering inside the PyImageSearch Gurus course. In the meantime, you should read up on the scikit-learn implementation of KMeans. This post also demonstrates how to use KMeans, just swap out the raw pixel intensities for your feature vectors.
Hello Adrian,
Could you please send me the dataset of 25 images which you have used in this?
Thanks in advance!!!
You can download the dataset of images (and the source code) using the “Downloads” form in this blog post.
How to change:
if I use opencv 3+ and python 3.0
Just change the
openmethod to use the “write” + “binary” flag:f = open(args["index"], "wb")Hey, I tried this on Python 3.4 and Open CV 3.1 I changed the following as stated in the comments things like ‘wb’ and from cPickle to pickle. I managed to run the files without error till the last search part where when I ran the command prompt I got this error UnicodeDecodeError: ‘charmap’ codec can’t decode byte 0x8d in position 187:character maps to
# load the index and initialize our searcher
index = pickle.loads(open(args[“index”]).read())
searcher = Searcher(index)
this was where it said it went wrong
You mentioned using Python 3.4, so to resolve the issue change the write mode from “w” to “wb” to indicate that the index should be serialized as a binary file. This should fix the problem.
Hey Adrian,
Basically you telling me to change the paths form / to \ was right. Just watch out guys when using windows some paths need \\ to run. If not youll get a open cv error. Thanks
hi,
I had some problems in my lap. How to update python in windows..
which is os is best ? running in LINUX or WINDOWS?
If you’re interested in studying computer vision and OpenCV, I would encourage you to use a Unix environment. Linux; specifically Ubuntu, and OSX are good choices.
Thanks Adam,
very clear, I Iearned a lot from this tutorial.
Fantastic, I’m glad to hear it Carlos! 🙂
Where do I save these files.?I am always getting ImportError: No module named pyimagesearch.rgbhistogram ?
If this is your first time creating a Python project, make sure you download the source code to this post using the “Downloads” form. Then, compare your directory structure with the correct directory structure of the downloaded project. One of the best ways to learn how to organize a Python project is to learn by example.
Adrian,
After using “pip install pyimagesearch” and “pip install pyautogui”, I still get “ModuleNotFoundError” errors.
ModuleNotFoundError: No module named ‘pyimagesearch.rgbhistogram’
ModuleNotFoundError: No module named ‘pyimagesearch.searcher’
Whats up?! Where can I find the documentation for these modules. I’n not sure these functions are still active.
Steven — you need to use the “Downloads” section of this blog post to download the source code and example images. These modules are not pip installable.
Really liked this beginning intro. I’m looking for ways to make computer science more practical and hands on. Image searching might be to “high bar” for intro computer science, but the kiddos need to see code in action, not just in endless repetitive examples of index array foo…. 🙂 (my opinion)
Really like the 21 day program so far.
-many blessings
Thanks John, I’m happy to hear that you’ve enjoyed the tutorial! I try to make all tutorials on the PyImageSearch blog super practical and hands-on. If you have any suggestions for future tutorials feel free to let me know.
hi Adrian. Thanks for the awesome tutorial. Can you please tell me how to run the codes?
Download the source code to this post using the “Downloads” section. At the top of every file I’ve included a line that says “USAGE”. Directly below that line is the example command you can use to execute the script.
Hi Adrian, Great article and very nice explanation thank you! I have a question for you, I am not newbie for OpenCV but I’m struggling to choose proper search engine algorithm on these days. Im triyng to find and count some spesific products on the self which is very complicated. Which algorithm would you choose for that work? Thank You.
It is highly dependent on what your products are, how large your database is, etc. I would suggest utilizing keypoints, local invariant descriptors, and keypoint matching as this will allow you to localize the objects in your image.
Hello,
I have just found your Blog, and it’s a great blog
Thank you for your effort giving help to others.
I would ask you a question if I can at the end of learning your guide, make an application like this in the link
https://www.youtube.com/watch?v=2Zj9o1KsUT4&feature=share
Like barcode scanner but with webcam with particularity it is faster than ocr and performant.
I took a look at the video, but I’m not exactly sure what your question is. Is your goal to build a barcode scanner using a webcam that also performs OCR?
Hi Adrian,
Where can I download the dataset for this tutorial?
Thanks
Hi Lugia — the dataset + source code for this tutorial are included in the “Downloads” section.
thanks very much, but can you give me a code to how I detect cars by python with opencv <3
I would suggest taking a look at the PyImageSearch Gurus course where I discuss and provide code to detect cars in images.
Traceback (most recent call last):
File “search.py”, line 24, in
index = cPickle.loads(open(args[“index”]).read())
TypeError: a bytes-like object is required, not ‘str’
how to solve this error..
Which version of Python are you using? Python 2.7? Or Python 3?
I’ve changed the interpreter from Python27 to Python36 and after several minor fixes obtained the same error:
TypeError: a bytes-like object is required, not ‘str’
Just switch to Python 2.7 version. It is really easy:
1) In your IDE (if you have IDE) change project interpreter to Python 2.7
2) In your terminal window call path with python27. For example:
c:\Python27\python.exe search.py -d “d:\path\to\the\hobbit-lotr-image-search-engine\images” -i index.cpickle
If you’re using Windows, add the line of code before
k = imagePath[imagePath.rfind(“/”) + 1:]
add
imagePath = imagePath.replace(“\\”, “/”) # replace backslashes in Windows os
k = imagePath[imagePath.rfind(“/”) + 1:]
If you’re using Windows, do not include trailing backslash “\” to your dataset path (“…\images\”), otherwise it’ll not work.
If you’re using OpenCV3 instead of OpenCV2, change the line of code in rgbhistogram.py file.
hist = cv2.normalize(hist)
to
hist = cv2.normalize(hist, hist)
Thank you for sharing Dzmitry!
can you please guide me how to use the source code, like I am using Pycharm with python 2.7 and OpenCv 2.4.9 (on windows). How do we run the file?
Do we need to set the dataset images path, query image path etc anywhere, if so, where and how it is to be done ?
Wow!
I am a complete neophyte but I absolutely loved this article. Great presentation style because it is so easy to understand and to follow with my own code while appreciating the fact that we are just scratching the surface.
I can’t wait to continue my journey with the other posts.
You rock, Adrian!
Live long and prosper, my friend.
Thanks Wade 🙂
Dear Professor, I run the program under window. I want to know how to give the path of image library ? I tried to type the command under the CMD window, but there was someting wrong. Would you please help me.
I changed the downloaded files to run on Python 3.x and OpenCV 3.3
Here are the changed statements.
index.py
import _pickle as cPickle
f = open(args[“index”], “wb”)
search.py
import _pickle as cPickle
index = cPickle.loads(open(args[“index”], “rb”).read())
for j in range(0, 10):
search_external.pi
import _pickle as cPickle
index = cPickle.loads(open(args[“index”], “rb”).read())
for j in range(0, 10):
Hi!
Thank you very much for this post.
I have a question: do you have any example of how to extract images Histograms or features directly from the web?
Such as reading the images from a web dataset an import just features?
Is this possible?
Thank you in advance for your answer. 🙂
Hi Rosa — you can technically download an image via URL using this post, but I do not recommend this if you want to work with images on the web. It’s much better to download local copies to your system so you can try out different algorithms and parameters on your dataset without having to access them one-by-one via URL.
Great article, Adrian!
I am just curious about the performance of this algorithm, i.e. how fast it runs on one core and multiple cores.
Are you referring to the searching step or the feature extraction step?
I am planning to use open CV program to count how many trucks passing my company gate. Which bundle that I need: basic, quick start or Hardcopy Bundle?
I personally would recommend either the Quickstart Bundle or Hardcopy Bundle of Practical Python and OpenCV. The benefit here is that you’ll be getting additional video tutorials and a pre-configured development environment to help you get started. If you have any other questions please let me know.
Hi,
Can you please tell me what are the exact steps to follow after downloading the code to make this program run? I am a newbie to programming and really want to learn.
I have installed numpy, still when running it in command window it is giving me this error: “ImportError: No module named ‘numpy’ “. I have installed openCV version 2.4 and python 2.7
Thanks
It sounds like you may have not installed NumPy:
$ pip install numpyMake sure you have NumPy installed on your system.
It’s an excellent article. Very well explained. Thanks Adrian!!
Thank you Madhur 🙂
Great tutorial!
I loved it. My first image search tutorial.
Thanks !!!
Thanks Ricardo, I’m glad you enjoyed it!
Hello Adrian,
can you help me to build ImageSearch Engine in C#? because I have 5+ years of experience in c# and I don’t know python.
I am interested to work with you regarding Image search engine.
How to run this code in which order that you have sent.
I am getting error tell me how to resolve it
usage: index.py [-h] -d DATASET -i INDEX
index.py: error: argument -d/–dataset is required
I am working on python 2.7 and on Windows 10.How to add the path to the dataset to resolve that error.
Please see this post on command line arguments to resolve the issue.
Great work!
But my English is so poor…….so read it slowly
Great Lesson!
I am new to image recognition. this lesson give me a lot of fundamental concept about image.
Thanks Adrian!
Thanks Zak, I’m glad you enjoyed! 🙂
Hi Adrian,
This has been really helpful for me,but I have a question regarding this blog post: how can I find the mean average precision for a query? i have to evaluate the performance,but i don’t know how to do it.
Just to clarify, you are referring to mAP for an image search engine and not an object detector or segmentation algorithm, correct? mAP can be a confusing to understand at first and depending on what type of mAP you want to compute the explanation could be a bit different.
Thanks Adrian for this blog. I find this very helpful, and am planning to test with my own images.
Thank you for the kind words, Skhan 🙂
I am a beginner ,this is my first lesson,still fighting to conceptualize,but so far so good.
This is the kind of lesson have been wanting for my research.Really opened my mind.
Thank you
Thank you Evaline, I really appreciate that 🙂
Note: For those who are more academically inclined, you might want to check out The Quadratic-Chi Histogram Distance Family from the ECCV ’10 conference if you are interested in histogram distance metrics. Link doesn’t work :-(((((((
Hello Adrian !!
I am a Chinese student and just beginning to learn computer vision, what’s the most excited thing is that so luckily find your blogs, which give me much inspiration and brave to continue my project. Follow your blobs, i successfully finished my search engine——Video retrieval tool based on perceived hash values, it’s so fabulous thing for myself.
I will continue to learn your blogs from first page, and keep my mind on your projects. finally, once again my sincerely thanks !!
Thank you for the kind words, Yiger! I’m so happy to hear you have enjoyed the blog and it’s been helpful to you 🙂
i am using windos and pycharm ide i have set comand line argument but i am getting this error
Usage:
pip [options]
no such option: –dataset
You should be using the “python” command to execute the script, not “pip”. The “pip” command is used to install Python packages.
Hi Adrain,
I am using python 3.6.4 on windows 8.1. I am on the first day of this course. I am having trouble in search_external.py in command execution.
I am executing
…
import imutils
ModuleNotFoundError: No module named ‘imutils'”
Couldn’t understand why this is happening
You need to install the “imutils” package on your system:
$ pip install imutilsHow would this scale if I used the same mechanism to create a similar products system for clothing.
For an e-commerce site.
If I add map reduce to increase the indexing speed and use k-mean clustering for shorter look-up.
If not the best approach then is there a better approach that is easy to implement?
I am new to computer vision. :-)))
This method is linear, O(n), meaning that it would not scale. If you would like to build an image search engine that scales to millions of images be sure to refer to the PyImageSearch Gurus course where I cover that exact topic.
Thanks! Great article. Can you advise me what should I use to make the same things but with an external camera online, not photo?