
Today’s blog post is part two in a three-part series on building a complete end-to-end image classification + deep learning application:
- Part 1: How to (quickly) build a deep learning image dataset
- Part 2: Keras and Convolutional Neural Networks (today’s post)
- Part 3: Running a Keras model on iOS (to be published next week)
By the end of today’s blog post, you will understand how to implement, train, and evaluate a Convolutional Neural Network on your own custom dataset.
And in next week’s post, I’ll be demonstrating how you can take your trained Keras model and deploy it to a smartphone app with just a few lines of code!
To keep the series lighthearted and fun, I am fulfilling a childhood dream of mine and building a Pokedex. A Pokedex is a device that exists in the world of Pokemon, a popular TV show, video game, and trading card series (I was/still am a huge Pokemon fan).
If you are unfamiliar with Pokemon, you should think of a Pokedex as a smartphone app that can recognize Pokemon, the animal-like creatures that exist in the world of Pokemon.
You can swap in your own datasets of course, I’m just having fun and enjoying a bit of childhood nostalgia.
To learn how to train a Convolutional Neural Network with Keras and deep learning on your own custom dataset, just keep reading.
Keras and Convolutional Neural Networks
2020-05-13 Update: This blog post is now TensorFlow 2+ compatible!
In last week’s blog post we learned how we can quickly build a deep learning image dataset — we used the procedure and code covered in the post to gather, download, and organize our images on disk.
Now that we have our images downloaded and organized, the next step is to train a Convolutional Neural Network (CNN) on top of the data.
I’ll be showing you how to train your CNN in today’s post using Keras and deep learning. The final part of this series, releasing next week, will demonstrate how you can take your trained Keras model and deploy it to a smartphone (in particular, iPhone) with only a few lines of code.
The end goal of this series is to help you build a fully functional deep learning app — use this series as an inspiration and starting point to help you build your own deep learning applications.
Let’s go ahead and get started training a CNN with Keras and deep learning.
Configuring your development environment
To configure your system for this tutorial, I first recommend following either of these tutorials:
Either tutorial will help you configure you system with all the necessary software for this blog post in a convenient Python virtual environment.
Please note that PyImageSearch does not recommend or support Windows for CV/DL projects.
Our deep learning dataset
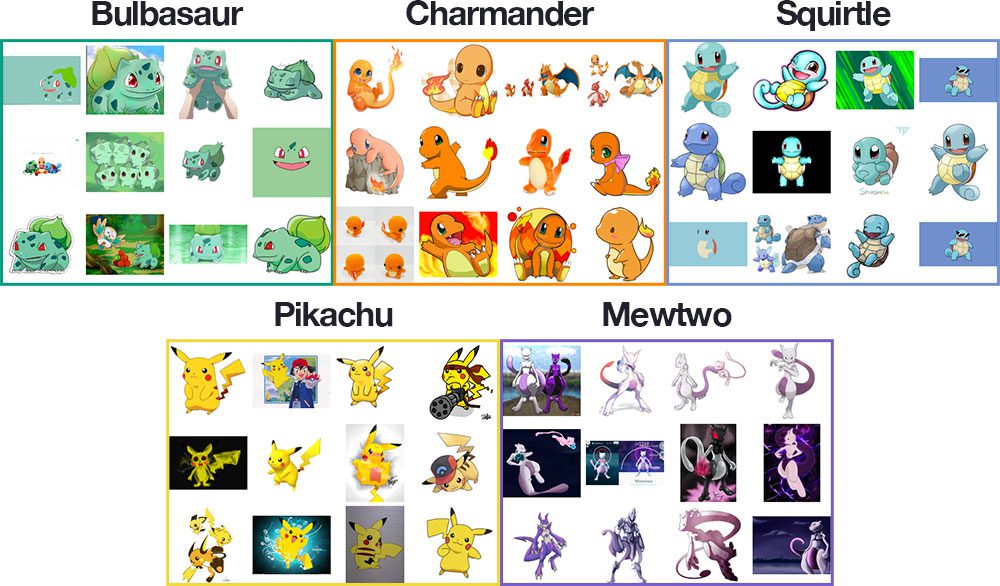
Our deep learning dataset consists of 1,191 images of Pokemon, (animal-like creatures that exist in the world of Pokemon, the popular TV show, video game, and trading card series).
Our goal is to train a Convolutional Neural Network using Keras and deep learning to recognize and classify each of these Pokemon.
The Pokemon we will be recognizing include:
- Bulbasaur (234 images)
- Charmander (238 images)
- Squirtle (223 images)
- Pikachu (234 images)
- Mewtwo (239 images)
A montage of the training images for each class can be seen in Figure 1 above.
As you can see, our training images include a mix of:
- Still frames from the TV show and movies
- Trading cards
- Action figures
- Toys and plushes
- Drawings and artistic renderings from fans
This diverse mix of training images will allow our CNN to recognize our five Pokemon classes across a range of images — and as we’ll see, we’ll be able to obtain 82%+ classification accuracy!
The Convolutional Neural Network and Keras project structure
Today’s project has several moving parts — to help us wrap our head around the project, let’s start by reviewing our directory structure for the project:
├── dataset │ ├── bulbasaur [234 entries] │ ├── charmander [238 entries] │ ├── mewtwo [239 entries] │ ├── pikachu [234 entries] │ └── squirtle [223 entries] ├── examples [6 entries] ├── pyimagesearch │ ├── __init__.py │ └── smallervggnet.py ├── plot.png ├── lb.pickle ├── pokedex.model ├── classify.py └── train.py
There are 3 directories:
dataset: Contains the five classes, each class is its own respective subdirectory to make parsing class labels easy.examples: Contains images we’ll be using to test our CNN.- The
pyimagesearchmodule: Contains ourSmallerVGGNetmodel class (which we’ll be implementing later in this post).
And 5 files in the root:
plot.png: Our training/testing accuracy and loss plot which is generated after the training script is ran.lb.pickle: OurLabelBinarizerserialized object file — this contains a class index to class name lookup mechamisn.pokedex.model: This is our serialized Keras Convolutional Neural Network model file (i.e., the “weights file”).train.py: We will use this script to train our Keras CNN, plot the accuracy/loss, and then serialize the CNN and label binarizer to disk.classify.py: Our testing script.
Our Keras and CNN architecture
The CNN architecture we will be utilizing today is a smaller, more compact variant of the VGGNet network, introduced by Simonyan and Zisserman in their 2014 paper, Very Deep Convolutional Networks for Large Scale Image Recognition.
VGGNet-like architectures are characterized by:
- Using only 3×3 convolutional layers stacked on top of each other in increasing depth
- Reducing volume size by max pooling
- Fully-connected layers at the end of the network prior to a softmax classifier
I assume you already have Keras installed and configured on your system. If not, here are a few links to deep learning development environment configuration tutorials I have put together:
- Configuring Ubuntu for deep learning with Python
- Setting up Ubuntu 16.04 + CUDA + GPU for deep learning with Python
- Configuring macOS for deep learning with Python
If you want to skip configuring your deep learning environment, I would recommend using one of the following pre-configured instances in the cloud:
- Amazon AMI for deep learning with Python
- Microsoft’s data science virtual machine (DSVM) for deep learning
Let’s go ahead and implement SmallerVGGNet , our smaller version of VGGNet. Create a new file named smallervggnet.py inside the pyimagesearch module and insert the following code:
# import the necessary packages from tensorflow.keras.models import Sequential from tensorflow.keras.layers import BatchNormalization from tensorflow.keras.layers import Conv2D from tensorflow.keras.layers import MaxPooling2D from tensorflow.keras.layers import Activation from tensorflow.keras.layers import Flatten from tensorflow.keras.layers import Dropout from tensorflow.keras.layers import Dense from tensorflow.keras import backend as K
First we import our modules — notice that they all come from Keras. Each of these are covered extensively throughout the course of reading Deep Learning for Computer Vision with Python.
Note: You’ll also want to create an __init__.py file inside pyimagesearch so Python knows the directory is a module. If you’re unfamiliar with __init__.py files or how they are used to create modules, no worries, just use the “Downloads” section at the end of this blog post to download my directory structure, source code, and dataset + example images.
From there, we define our SmallerVGGNet class:
class SmallerVGGNet: @staticmethod def build(width, height, depth, classes): # initialize the model along with the input shape to be # "channels last" and the channels dimension itself model = Sequential() inputShape = (height, width, depth) chanDim = -1 # if we are using "channels first", update the input shape # and channels dimension if K.image_data_format() == "channels_first": inputShape = (depth, height, width) chanDim = 1
Our build method requires four parameters:
width: The image width dimension.height: The image height dimension.depth: The depth of the image — also known as the number of channels.classes: The number of classes in our dataset (which will affect the last layer of our model). We’re utilizing 5 Pokemon classes in this post, but don’t forget that you could work with the 807 Pokemon species if you downloaded enough example images for each species!
Note: We’ll be working with input images that are 96 x 96 with a depth of 3 (as we’ll see later in this post). Keep this in mind as we explain the spatial dimensions of the input volume as it passes through the network.
Since we’re using the TensorFlow backend, we arrange the input shape with “channels last” data ordering, but if you want to use “channels first” (Theano, etc.) then it is handled automagically on Lines 23-25.
Now, let’s start adding layers to our model:
# CONV => RELU => POOL
model.add(Conv2D(32, (3, 3), padding="same",
input_shape=inputShape))
model.add(Activation("relu"))
model.add(BatchNormalization(axis=chanDim))
model.add(MaxPooling2D(pool_size=(3, 3)))
model.add(Dropout(0.25))
Above is our first CONV => RELU => POOL block.
The convolution layer has 32 filters with a 3 x 3 kernel. We’re using RELU the activation function followed by batch normalization.
Our POOL layer uses a 3 x 3 POOL size to reduce spatial dimensions quickly from 96 x 96 to 32 x 32 (we’ll be using 96 x 96 x 3 input images to train our network as we’ll see in the next section).
As you can see from the code block, we’ll also be utilizing dropout in our network architecture. Dropout works by randomly disconnecting nodes from the current layer to the next layer. This process of random disconnects during training batches helps naturally introduce redundancy into the model — no one single node in the layer is responsible for predicting a certain class, object, edge, or corner.
From there we’ll add (CONV => RELU) * 2 layers before applying another POOL layer:
# (CONV => RELU) * 2 => POOL
model.add(Conv2D(64, (3, 3), padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(axis=chanDim))
model.add(Conv2D(64, (3, 3), padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(axis=chanDim))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
Stacking multiple CONV and RELU layers together (prior to reducing the spatial dimensions of the volume) allows us to learn a richer set of features.
Notice how:
- We’re increasing our filter size from
32to64. The deeper we go in the network, the smaller the spatial dimensions of our volume, and the more filters we learn. - We decreased how max pooling size from
3 x 3to2 x 2to ensure we do not reduce our spatial dimensions too quickly.
Dropout is again performed at this stage.
Let’s add another set of (CONV => RELU) * 2 => POOL :
# (CONV => RELU) * 2 => POOL
model.add(Conv2D(128, (3, 3), padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(axis=chanDim))
model.add(Conv2D(128, (3, 3), padding="same"))
model.add(Activation("relu"))
model.add(BatchNormalization(axis=chanDim))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.25))
Notice that we’ve increased our filter size to 128 here. Dropout of 25% of the nodes is performed to reduce overfitting again.
And finally, we have a set of FC => RELU layers and a softmax classifier:
# first (and only) set of FC => RELU layers
model.add(Flatten())
model.add(Dense(1024))
model.add(Activation("relu"))
model.add(BatchNormalization())
model.add(Dropout(0.5))
# softmax classifier
model.add(Dense(classes))
model.add(Activation("softmax"))
# return the constructed network architecture
return model
The fully connected layer is specified by Dense(1024) with a rectified linear unit activation and batch normalization.
Dropout is performed a final time — this time notice that we’re dropping out 50% of the nodes during training. Typically you’ll use a dropout of 40-50% in our fully-connected layers and a dropout with much lower rate, normally 10-25% in previous layers (if any dropout is applied at all).
We round out the model with a softmax classifier that will return the predicted probabilities for each class label.
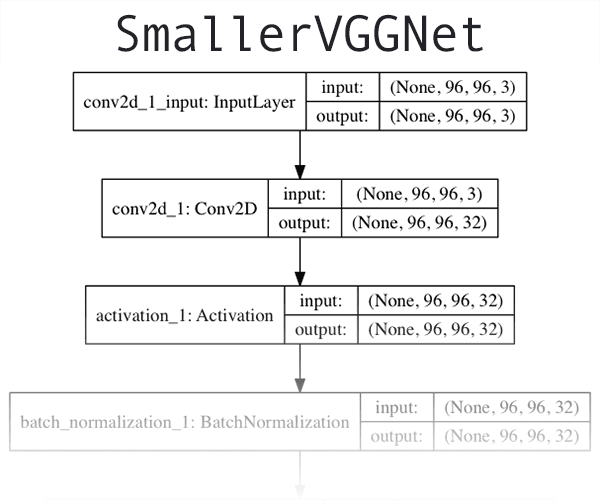
A visualization of the network architecture of first few layers of SmallerVGGNet can be seen in Figure 2 at the top of this section. To see the full resolution of our Keras CNN implementation of SmallerVGGNet , refer to the following link.
Implementing our CNN + Keras training script
Now that SmallerVGGNet is implemented, we can train our Convolutional Neural Network using Keras.
Open up a new file, name it train.py , and insert the following code where we’ll import our required packages and libraries:
# set the matplotlib backend so figures can be saved in the background
import matplotlib
matplotlib.use("Agg")
# import the necessary packages
from tensorflow.keras.preprocessing.image import ImageDataGenerator
from tensorflow.keras.optimizers import Adam
from tensorflow.keras.preprocessing.image import img_to_array
from sklearn.preprocessing import LabelBinarizer
from sklearn.model_selection import train_test_split
from pyimagesearch.smallervggnet import SmallerVGGNet
import matplotlib.pyplot as plt
from imutils import paths
import numpy as np
import argparse
import random
import pickle
import cv2
import os
We are going to use the "Agg" matplotlib backend so that figures can be saved in the background (Line 3).
The ImageDataGenerator class will be used for data augmentation, a technique used to take existing images in our dataset and apply random transformations (rotations, shearing, etc.) to generate additional training data. Data augmentation helps prevent overfitting.
Line 7 imports the Adam optimizer, the optimizer method used to train our network.
The LabelBinarizer (Line 9) is an important class to note — this class will enable us to:
- Input a set of class labels (i.e., strings representing the human-readable class labels in our dataset).
- Transform our class labels into one-hot encoded vectors.
- Allow us to take an integer class label prediction from our Keras CNN and transform it back into a human-readable label.
I often get asked hereon the PyImageSearch blog how we can transform a class label string to an integer and vice versa. Now you know the solution is to use the LabelBinarizer class.
The train_test_split function (Line 10) will be used to create our training and testing splits. Also take note of our SmallerVGGNet import on Line 11 — this is the Keras CNN we just implemented in the previous section.
Readers of this blog are familiar with my very own imutils package. If you don’t have it installed/updated, you can install it via:
$ pip install --upgrade imutils
If you are using a Python virtual environment (as we typically do here on the PyImageSearch blog), make sure you use the workon command to access your particular virtual environment before installing/upgrading imutils .
From there, let’s parse our command line arguments:
# construct the argument parse and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-d", "--dataset", required=True,
help="path to input dataset (i.e., directory of images)")
ap.add_argument("-m", "--model", required=True,
help="path to output model")
ap.add_argument("-l", "--labelbin", required=True,
help="path to output label binarizer")
ap.add_argument("-p", "--plot", type=str, default="plot.png",
help="path to output accuracy/loss plot")
args = vars(ap.parse_args())
For our training script, we need to supply three required command line arguments:
--dataset: The path to the input dataset. Our dataset is organized in adatasetdirectory with subdirectories representing each class. Inside each subdirectory is ~250 Pokemon images. See the project directory structure at the top of this post for more details.--model: The path to the output model — this training script will train the model and output it to disk.--labelbin: The path to the output label binarizer — as you’ll see shortly, we’ll extract the class labels from the dataset directory names and build the label binarizer.
We also have one optional argument, --plot . If you don’t specify a path/filename, then a plot.png file will be placed in the current working directory.
You do not need to modify Lines 22-31 to supply new file paths. The command line arguments are handled at runtime. If this doesn’t make sense to you, be sure to review my command line arguments blog post.
Now that we’ve taken care of our command line arguments, let’s initialize some important variables:
# initialize the number of epochs to train for, initial learning rate,
# batch size, and image dimensions
EPOCHS = 100
INIT_LR = 1e-3
BS = 32
IMAGE_DIMS = (96, 96, 3)
# initialize the data and labels
data = []
labels = []
# grab the image paths and randomly shuffle them
print("[INFO] loading images...")
imagePaths = sorted(list(paths.list_images(args["dataset"])))
random.seed(42)
random.shuffle(imagePaths)
Lines 35-38 initialize important variables used when training our Keras CNN:
EPOCHS:The total number of epochs we will be training our network for (i.e., how many times our network “sees” each training example and learns patterns from it).INIT_LR:The initial learning rate — a value of 1e-3 is the default value for the Adam optimizer, the optimizer we will be using to train the network.BS:We will be passing batches of images into our network for training. There are multiple batches per epoch. TheBSvalue controls the batch size.IMAGE_DIMS:Here we supply the spatial dimensions of our input images. We’ll require our input images to be96 x 96pixels with3channels (i.e., RGB). I’ll also note that we specifically designed SmallerVGGNet with96 x 96images in mind.
We also initialize two lists — data and labels which will hold the preprocessed images and labels, respectively.
Lines 46-48 grab all of the image paths and randomly shuffle them.
And from there, we’ll loop over each of those imagePaths :
# loop over the input images for imagePath in imagePaths: # load the image, pre-process it, and store it in the data list image = cv2.imread(imagePath) image = cv2.resize(image, (IMAGE_DIMS[1], IMAGE_DIMS[0])) image = img_to_array(image) data.append(image) # extract the class label from the image path and update the # labels list label = imagePath.split(os.path.sep)[-2] labels.append(label)
We loop over the imagePaths on Line 51 and then proceed to load the image (Line 53) and resize it to accommodate our model (Line 54).
Now it’s time to update our data and labels lists.
We call the Keras img_to_array function to convert the image to a Keras-compatible array (Line 55) followed by appending the image to our list called data (Line 56).
For our labels list, we extract the label from the file path on Line 60 and append it (the label) on Line 61.
So, why does this class label parsing process work?
Consider that fact that we purposely created our dataset directory structure to have the following format:
dataset/{CLASS_LABEL}/{FILENAME}.jpg
Using the path separator on Line 60 we can split the path into an array and then grab the second-to-last entry in the list — the class label.
If this process seems confusing to you, I would encourage you to open up a Python shell and explore an example imagePath by splitting the path on your operating system’s respective path separator.
Let’s keep moving. A few things are happening in this next code block — additional preprocessing, binarizing labels, and partitioning the data:
# scale the raw pixel intensities to the range [0, 1]
data = np.array(data, dtype="float") / 255.0
labels = np.array(labels)
print("[INFO] data matrix: {:.2f}MB".format(
data.nbytes / (1024 * 1000.0)))
# binarize the labels
lb = LabelBinarizer()
labels = lb.fit_transform(labels)
# partition the data into training and testing splits using 80% of
# the data for training and the remaining 20% for testing
(trainX, testX, trainY, testY) = train_test_split(data,
labels, test_size=0.2, random_state=42)
Here we first convert the data array to a NumPy array and then scale the pixel intensities to the range [0, 1] (Line 64). We also convert the labels from a list to a NumPy array on Line 65. An info message is printed which shows the size (in MB) of the data matrix.
Then, we binarize the labels utilizing scikit-learn’s LabelBinarizer (Lines 70 and 71).
With deep learning, or any machine learning for that matter, a common practice is to make a training and testing split. This is handled on Lines 75 and 76 where we create an 80/20 random split of the data.
Next, let’s create our image data augmentation object:
# construct the image generator for data augmentation aug = ImageDataGenerator(rotation_range=25, width_shift_range=0.1, height_shift_range=0.1, shear_range=0.2, zoom_range=0.2, horizontal_flip=True, fill_mode="nearest")
Since we’re working with a limited amount of data points (< 250 images per class), we can make use of data augmentation during the training process to give our model more images (based on existing images) to train with.
Data Augmentation is a tool that should be in every deep learning practitioner’s toolbox. I cover data augmentation in the Practitioner Bundle of Deep Learning for Computer Vision with Python.
We initialize aug, our ImageDataGenerator , on Lines 79-81.
From there, let’s compile the model and kick off the training:
# initialize the model
print("[INFO] compiling model...")
model = SmallerVGGNet.build(width=IMAGE_DIMS[1], height=IMAGE_DIMS[0],
depth=IMAGE_DIMS[2], classes=len(lb.classes_))
opt = Adam(lr=INIT_LR, decay=INIT_LR / EPOCHS)
model.compile(loss="categorical_crossentropy", optimizer=opt,
metrics=["accuracy"])
# train the network
print("[INFO] training network...")
H = model.fit(
x=aug.flow(trainX, trainY, batch_size=BS),
validation_data=(testX, testY),
steps_per_epoch=len(trainX) // BS,
epochs=EPOCHS, verbose=1)
On Lines 85 and 86, we initialize our Keras CNN model with 96 x 96 x 3 input spatial dimensions. I’ll state this again as I receive this question often — SmallerVGGNet was designed to accept 96 x 96 x 3 input images. If you want to use different spatial dimensions you may need to either:
- Reduce the depth of the network for smaller images
- Increase the depth of the network for larger images
Do not go blindly editing the code. Consider the implications larger or smaller images will have first!
We’re going to use the Adam optimizer with learning rate decay (Line 87) and then compile our model with categorical cross-entropy since we have > 2 classes (Lines 88 and 89).
Note: For only two classes you should use binary cross-entropy as the loss.
From there, we make a call to the Keras fit method to train the network (Lines 93-97). Be patient — this can take some time depending on whether you are training using a CPU or a GPU.
2020-05-13 Update: Formerly, TensorFlow/Keras required use of a method called fit_generator in order to accomplish data augmentation. Now the fit method can handle data augmentation as well making for more-consistent code. Be sure to check out my articles about fit and fit generator as well as data augmentation.
Once our Keras CNN has finished training, we’ll want to save both the (1) model and (2) label binarizer as we’ll need to load them from disk when we test the network on images outside of our training/testing set:
# save the model to disk
print("[INFO] serializing network...")
model.save(args["model"], save_format="h5")
# save the label binarizer to disk
print("[INFO] serializing label binarizer...")
f = open(args["labelbin"], "wb")
f.write(pickle.dumps(lb))
f.close()
We serialize the model (Line 101) and the label binarizer (Lines 105-107) so we can easily use them later in our classify.py script.
The label binarizer file contains the class index to human-readable class label dictionary. This object ensures we don’t have to hardcode our class labels in scripts that wish to use our Keras CNN.
Finally, we can plot our training and loss accuracy:
# plot the training loss and accuracy
plt.style.use("ggplot")
plt.figure()
N = EPOCHS
plt.plot(np.arange(0, N), H.history["loss"], label="train_loss")
plt.plot(np.arange(0, N), H.history["val_loss"], label="val_loss")
plt.plot(np.arange(0, N), H.history["accuracy"], label="train_acc")
plt.plot(np.arange(0, N), H.history["val_accuracy"], label="val_acc")
plt.title("Training Loss and Accuracy")
plt.xlabel("Epoch #")
plt.ylabel("Loss/Accuracy")
plt.legend(loc="upper left")
plt.savefig(args["plot"])
2020-05-13 Update: In order for this plotting snippet to be TensorFlow 2+ compatible the H.history dictionary keys are updated to fully spell out “accuracy” sans “acc” (i.e., H.history["val_accuracy"] and H.history["accuracy"]). It is semi-confusing that “val” is not spelled out as “validation”; we have to learn to love and live with the API and always remember that it is a work in progress that many developers around the world contribute to.
I elected to save my plot to disk (Line 121) rather than displaying it for two reasons: (1) I’m on a headless server in the cloud and (2) I wanted to make sure I don’t forget to save the plot.
Training our CNN with Keras
Now we’re ready to train our Pokedex CNN.
Be sure to visit the “Downloads” section of this blog post to download code + data.
Then execute the following command to train the mode; while making sure to provide the command line arguments properly:
$ python train.py --dataset dataset --model pokedex.model --labelbin lb.pickle Using TensorFlow backend. [INFO] loading images... [INFO] data matrix: 252.07MB [INFO] compiling model... [INFO] training network... Train for 29 steps, validate on 234 samples Epoch 1/100 29/29 [==============================] - 7s 237ms/step - loss: 1.4218 - accuracy: 0.6271 - val_loss: 1.9534 - val_accuracy: 0.2436 Epoch 2/100 29/29 [==============================] - 6s 208ms/step - loss: 0.7470 - accuracy: 0.7703 - val_loss: 2.7184 - val_accuracy: 0.3632 Epoch 3/100 29/29 [==============================] - 6s 207ms/step - loss: 0.5928 - accuracy: 0.8080 - val_loss: 2.8207 - val_accuracy: 0.2436 ... 29/29 [==============================] - 6s 208ms/step - loss: 0.2108 - accuracy: 0.9423 - val_loss: 1.7813 - val_accuracy: 0.8248 Epoch 98/100 29/29 [==============================] - 6s 208ms/step - loss: 0.1170 - accuracy: 0.9645 - val_loss: 2.2405 - val_accuracy: 0.7265 Epoch 99/100 29/29 [==============================] - 6s 208ms/step - loss: 0.0961 - accuracy: 0.9689 - val_loss: 1.2761 - val_accuracy: 0.8333 Epoch 100/100 29/29 [==============================] - 6s 207ms/step - loss: 0.0449 - accuracy: 0.9834 - val_loss: 1.1710 - val_accuracy: 0.8291 [INFO] serializing network... [INFO] serializing label binarizer...
Looking at the output of our training script we see that our Keras CNN obtained:
- 98.34% classification accuracy on the training set
- And 82.91% accuracy on the testing set
The training loss/accuracy plot follows:
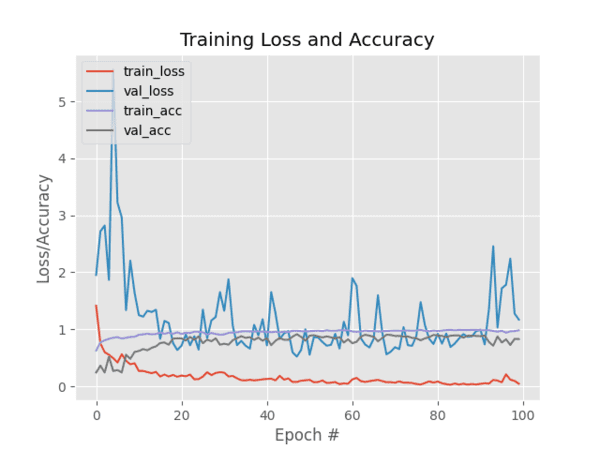
As you can see in Figure 3, I trained the model for 100 epochs and achieved low loss with limited overfitting. With additional training data we could obtain higher accuracy as well.
Creating our CNN and Keras testing script
Now that our CNN is trained, we need to implement a script to classify images that are not part of our training or validation/testing set. Open up a new file, name it classify.py , and insert the following code:
# import the necessary packages from tensorflow.keras.preprocessing.image import img_to_array from tensorflow.keras.models import load_model import numpy as np import argparse import imutils import pickle import cv2 import os
First we import the necessary packages (Lines 2-9).
From there, let’s parse command line arguments:
# construct the argument parser and parse the arguments
ap = argparse.ArgumentParser()
ap.add_argument("-m", "--model", required=True,
help="path to trained model model")
ap.add_argument("-l", "--labelbin", required=True,
help="path to label binarizer")
ap.add_argument("-i", "--image", required=True,
help="path to input image")
args = vars(ap.parse_args())
We’ve have three required command line arguments we need to parse:
--model: The path to the model that we just trained.--labelbin: The path to the label binarizer file.--image: Our input image file path.
Each of these arguments is established and parsed on Lines 12-19. Remember, you don’t need to modify these lines — I’ll show you how to run the program in the next section using the command line arguments provided at runtime.
Next, we’ll load and preprocess the image:
# load the image
image = cv2.imread(args["image"])
output = image.copy()
# pre-process the image for classification
image = cv2.resize(image, (96, 96))
image = image.astype("float") / 255.0
image = img_to_array(image)
image = np.expand_dims(image, axis=0)
Here we load the input image (Line 22) and make a copy called output for display purposes (Line 23).
Then we preprocess the image in the exact same manner that we did for training (Lines 26-29).
From there, let’s load the model + label binarizer and then classify the image:
# load the trained convolutional neural network and the label
# binarizer
print("[INFO] loading network...")
model = load_model(args["model"])
lb = pickle.loads(open(args["labelbin"], "rb").read())
# classify the input image
print("[INFO] classifying image...")
proba = model.predict(image)[0]
idx = np.argmax(proba)
label = lb.classes_[idx]
In order to classify the image, we need the model and label binarizer in memory. We load both on Lines 34 and 35.
Subsequently, we classify the image and create the label (Lines 39-41).
The remaining code block is for display purposes:
# we'll mark our prediction as "correct" of the input image filename
# contains the predicted label text (obviously this makes the
# assumption that you have named your testing image files this way)
filename = args["image"][args["image"].rfind(os.path.sep) + 1:]
correct = "correct" if filename.rfind(label) != -1 else "incorrect"
# build the label and draw the label on the image
label = "{}: {:.2f}% ({})".format(label, proba[idx] * 100, correct)
output = imutils.resize(output, width=400)
cv2.putText(output, label, (10, 25), cv2.FONT_HERSHEY_SIMPLEX,
0.7, (0, 255, 0), 2)
# show the output image
print("[INFO] {}".format(label))
cv2.imshow("Output", output)
cv2.waitKey(0)
On Lines 46 and 47, we’re extracting the name of the Pokemon from the filename and comparing it to the label . The correct variable will be either "correct" or "incorrect" based on this. Obviously these two lines make the assumption that your input image has a filename that contains the true label.
From there we take the following steps:
- Append the probability percentage and
"correct"/"incorrect"text to the classlabel(Line 50). - Resize the
outputimage so it fits our screen (Line 51). - Draw the
labeltext on theoutputimage (Lines 52 and 53). - Display the
outputimage and wait for a keypress to exit (Lines 57 and 58).
Classifying images with our CNN and Keras
We’re now ready to run the classify.py script!
Ensure that you’ve grabbed the code + images from the “Downloads” section at the bottom of this post.
Once you’ve downloaded and unzipped the archive change into the root directory of this project and follow along starting with an image of Charmander. Notice that we’ve provided three command line arguments in order to run the script:
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/charmander_counter.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] charmander: 85.42% (correct)

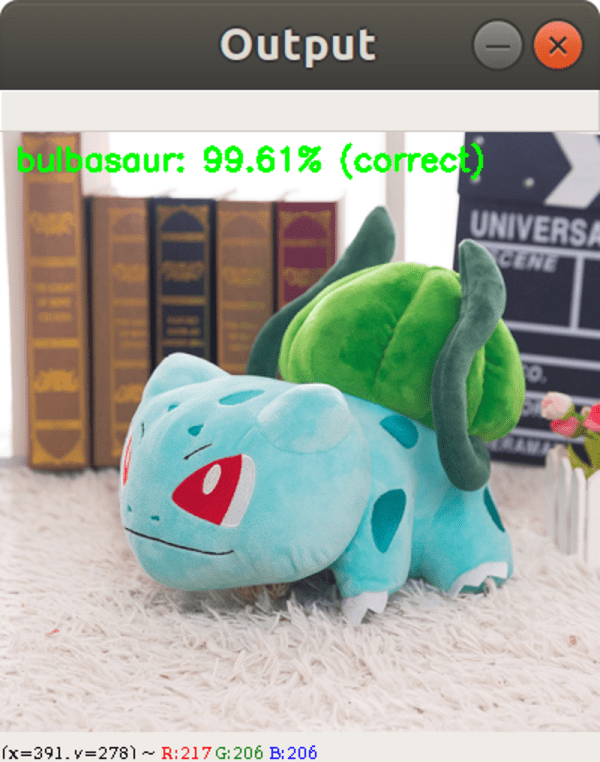
And now let’s query our model with the loyal and fierce Bulbasaur stuffed Pokemon:
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/bulbasaur_plush.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] bulbasaur: 99.61% (correct)
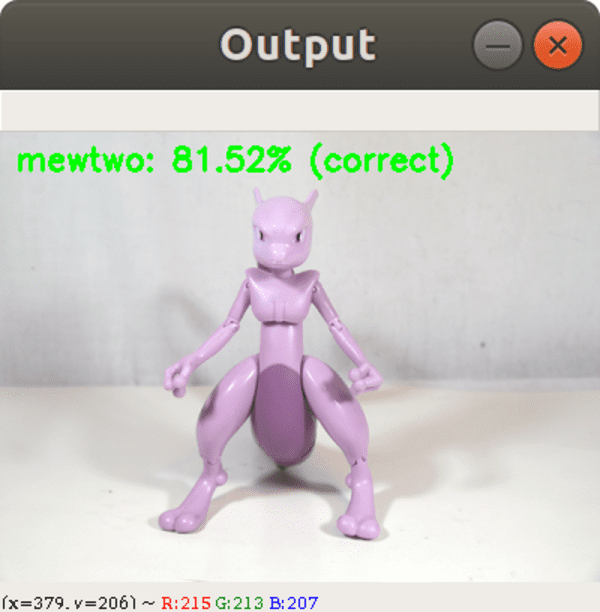
Let’s try a toy action figure of Mewtwo (a genetically engineered Pokemon):
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/mewtwo_toy.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] mewtwo: 81.52% (correct)
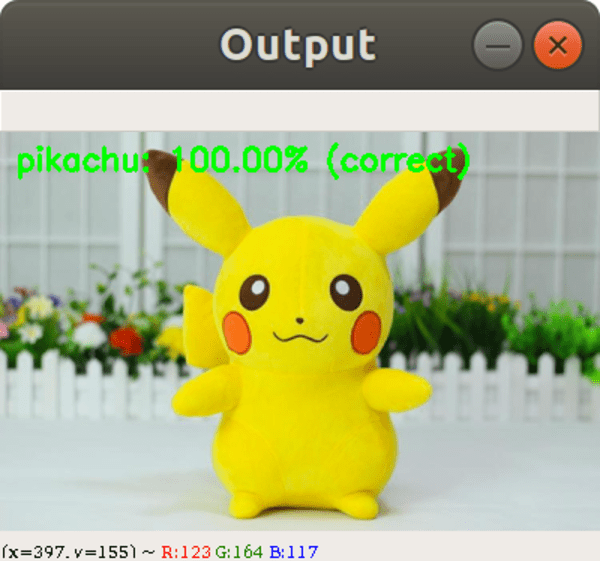
What would an example Pokedex be if it couldn’t recognize the infamous Pikachu:
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/pikachu_toy.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] pikachu: 100.00% (correct)
Let’s try the cute Squirtle Pokemon:
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/squirtle_plush.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] squirtle: 99.96% (correct)

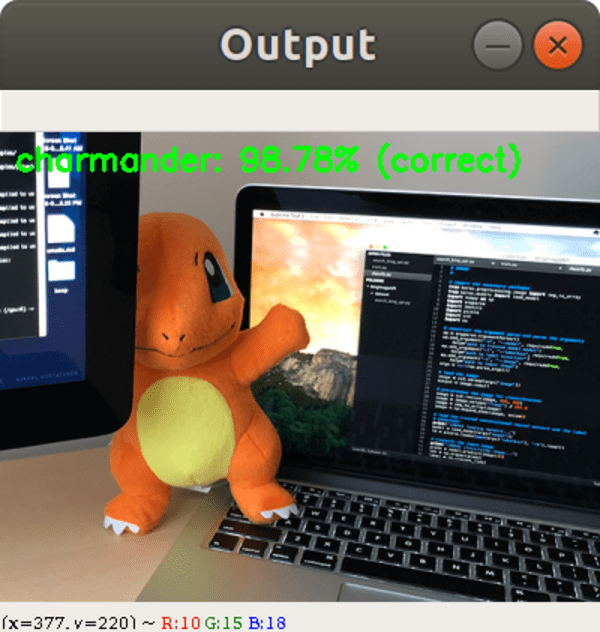
And last but not least, let’s classify my fire-tailed Charmander again. This time he is being shy and is partially occluded by my monitor.
$ python classify.py --model pokedex.model --labelbin lb.pickle \ --image examples/charmander_hidden.png Using TensorFlow backend. [INFO] loading network... [INFO] classifying image... [INFO] charmander: 98.78% (correct)
Each of these Pokemons were no match for my new Pokedex.
Currently, there are around 807 different species of Pokemon. Our classifier was trained on only five different Pokemon (for the sake of simplicity).
If you’re looking to train a classifier to recognize more Pokemon for a bigger Pokedex, you’ll need additional training images for each class. Ideally, your goal should be to have 500-1,000 images per class you wish to recognize.
To acquire training images, I suggest that you look no further than Microsoft Bing’s Image Search API. This API is hands down easier to use than the previous hack of Google Image Search that I shared (but that would work too).
Limitations of this model
One of the primary limitations of this model is the small amount of training data. I tested on various images and at times the classifications were incorrect. When this happened, I examined the input image + network more closely and found that the color(s) most dominant in the image influence the classification dramatically.
For example, lots of red and oranges in an image will likely return “Charmander” as the label. Similarly, lots of yellows in an image will normally result in a “Pikachu” label.
This is partially due to our input data. Pokemon are obviously fictitious so there no actual “real-world” images of them (other than the action figures and toy plushes).
Most of our images came from either fan illustrations or stills from the movie/TV show. And furthermore, we only had a limited amount of data for each class (~225-250 images).
Ideally, we should have at least 500-1,000 images per class when training a Convolutional Neural Network. Keep this in mind when working with your own data.
Can we use this Keras deep learning model as a REST API?
If you would like to run this model (or any other deep learning model) as a REST API, I wrote three blog posts to help you get started:
- Building a simple Keras + deep learning REST API (Keras.io guest post)
- A scalable Keras + deep learning REST API
- Deep learning in production with Keras, Redis, Flask, and Apache
What's next? I recommend PyImageSearch University.

30+ total classes • 39h 44m video • Last updated: 12/2021
★★★★★ 4.84 (128 Ratings) • 3,000+ Students Enrolled
I strongly believe that if you had the right teacher you could master computer vision and deep learning.
Do you think learning computer vision and deep learning has to be time-consuming, overwhelming, and complicated? Or has to involve complex mathematics and equations? Or requires a degree in computer science?
That’s not the case.
All you need to master computer vision and deep learning is for someone to explain things to you in simple, intuitive terms. And that’s exactly what I do. My mission is to change education and how complex Artificial Intelligence topics are taught.
If you're serious about learning computer vision, your next stop should be PyImageSearch University, the most comprehensive computer vision, deep learning, and OpenCV course online today. Here you’ll learn how to successfully and confidently apply computer vision to your work, research, and projects. Join me in computer vision mastery.
Inside PyImageSearch University you'll find:
- ✓ 30+ courses on essential computer vision, deep learning, and OpenCV topics
- ✓ 30+ Certificates of Completion
- ✓ 39h 44m on-demand video
- ✓ Brand new courses released every month, ensuring you can keep up with state-of-the-art techniques
- ✓ Pre-configured Jupyter Notebooks in Google Colab
- ✓ Run all code examples in your web browser — works on Windows, macOS, and Linux (no dev environment configuration required!)
- ✓ Access to centralized code repos for all 500+ tutorials on PyImageSearch
- ✓ Easy one-click downloads for code, datasets, pre-trained models, etc.
- ✓ Access on mobile, laptop, desktop, etc.
Summary
In today’s blog post you learned how to train a Convolutional Neural Network (CNN) using the Keras deep learning library.
Our dataset was gathered using the procedure discussed in last week’s blog post.
In particular, our dataset consists of 1,191 images of five separate Pokemon (animal-like creatures that exist in the world of Pokemon, the popular TV show, video game, and trading card series).
Using our Convolutional Neural Network and Keras, we were able to obtain 82% accuracy, which is quite respectable given (1) the limited size of our dataset and (2) the number of parameters in our network.
In next week’s blog post I’ll be demonstrating how we can:
- Take our trained Keras + Convolutional Neural Network model…
- …and deploy it to a smartphone with only a few lines of code!
It’s going to be a great post, don’t miss it!
To download the source code to this post (and be notified when next week’s can’t miss post goes live), just enter your email address in the form below!

Download the Source Code and FREE 17-page Resource Guide
Enter your email address below to get a .zip of the code and a FREE 17-page Resource Guide on Computer Vision, OpenCV, and Deep Learning. Inside you'll find my hand-picked tutorials, books, courses, and libraries to help you master CV and DL!

